書誌情報
要約
特許請求の範囲
発明の詳細な説明
図面の簡単な説明
図面
《表紙》
(19)【発行国】日本国特許庁(JP)
(12)【公報種別】公開特許公報(A)
(11)【公開番号】特開2000−166997(P2000−166997A)
(43)【公開日】平成12年6月20日(2000.6.20)
(54)【発明の名称】歩行補助装置
(51)【国際特許分類第7版】
A61H 3/00
【FI】
A61H 3/00 Z
【審査請求】未請求
【請求項の数】1
【出願形態】OL
【全頁数】11
(21)【出願番号】特願平10−351798
(22)【出願日】平成10年12月10日(1998.12.10)
(71)【出願人】
【識別番号】000004204
【氏名又は名称】日本精工株式会社
【住所又は居所】東京都品川区大崎1丁目6番3号
(72)【発明者】
【氏名】大宮 雅喜
【住所又は居所】神奈川県藤沢市桐原町12番地 日本精工株式会社内
(72)【発明者】
【氏名】緑川 幸則
【住所又は居所】神奈川県藤沢市桐原町12番地 日本精工株式会社内
(72)【発明者】
【氏名】和田 良彦
【住所又は居所】神奈川県藤沢市桐原町12番地 日本精工株式会社内
(72)【発明者】
【氏名】齋藤 博幸
【住所又は居所】神奈川県藤沢市桐原町12番地 日本精工株式会社内
(74)【代理人】
【識別番号】100081880
【弁理士】
【氏名又は名称】渡部 敏彦
(57)【要約】
【課題】 手軽に日常の歩行動作の補助をすることができる歩行補助装置を提供する。
【解決手段】 使用者の胴体に対する大腿部の前後方向の角度を検出し、この検出された角度を時間微分し、この微分値から前記検出された角度が足を前方に踏み出す方向に増加しているか否かを判別し、該角度が足を前方に踏み出す方向に増加している場合には、該角度が増加している足の歩行補助を行うためにモータ8に所定のパルス幅のパルスを周期的に供給する。
【特許請求の範囲】
【請求項1】 人間の両足の動きを補助するための動力を有する動力手段と、前記両足の動きを検出する検出手段と、前記検出手段により両足の動きが検出されたときに、前記両足の動きを補助するように前記動力手段の動力を制御する制御手段とを備えることを特徴とする歩行補助装置。
【発明の詳細な説明】
【0001】
【発明の属する技術分野】人の歩行動作の補助をする歩行補助装置に関する。
【0002】
【従来の技術】人は怪我、病気及び老衰等により行動能力が低下すると、歩行等の日常的な行動にも苦痛及び困難を伴うようになり、補助を求めるようになる。そして、歩行が不可能又は非常に困難な人には車椅子、松葉杖等の歩行補助装置がある。また、健常者のためにも補助動力付きの自転車等がある。
【0003】
【発明が解決しようとする課題】しかしながら、歩行が可能であるが、それに多少の苦痛を伴う人は、車椅子、松葉杖等の歩行補助装置を使用することは逆に煩わしいものであった。また、補助動力付きの自転車は通常の使用範囲ではその効果を発揮できるが、例えば、階段がある場所等では効果を発揮することはできなかった。
【0004】本発明は、上記点に着目してなされたものであり、手軽に日常の歩行動作の補助をすることができる歩行補助装置を提供することを目的とする。
【0005】
【課題を解決するための手段】上記目的を達成するために、請求項1の歩行補助装置は、人間の両足の動きを補助するための動力を有する動力手段と、前記両足の動きを検出する検出手段と、前記検出手段により両足の動きが検出されたときに、前記両足の動きを補助するように前記動力手段の動力を制御する制御手段とを備えることを特徴とする。
【0006】
【発明の実施の形態】以下、本発明の実施の形態を図面を参照して説明する。
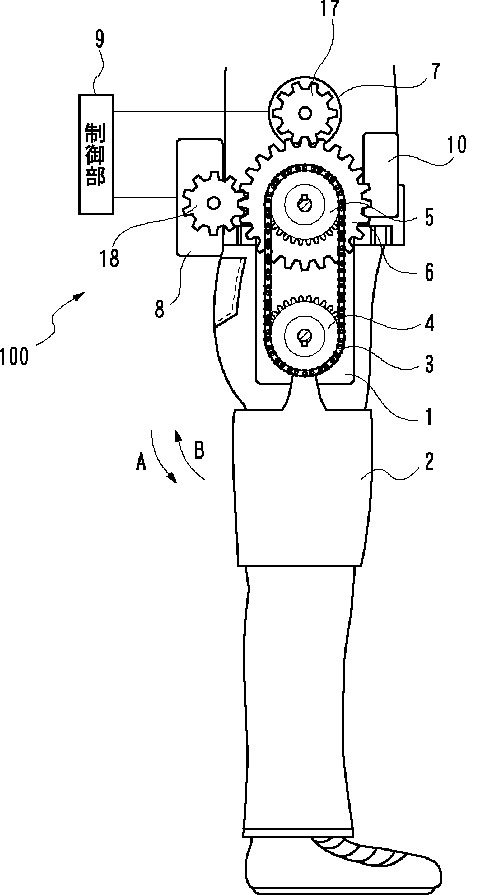
【0007】(第1の実施の形態)図1は、本発明の第1の実施の形態に係る歩行補助装置100の構成を示す図である。
【0008】この歩行補助装置100は、当該装置を使用者の体に装着するための固定具1と、使用者の左右の大腿部に夫々装着される補助器具2と、補助器具2の一端に固定されているギア4と、左右の補助器具2にギア4,5を介してモータ8の動力を伝達するチェーン3とを備えている。
【0009】モータ8はギア18を備え、ギア18にはギア6が噛み合い、ギア6とギア5とは回転軸が同一に形成されている。ギア6にはギア17が噛み合い、ギア17は、その回転状態を検知するため、回転検知センサ7のセンサ部の回転軸に取り付けられている。さらに、回転検知センサ7及びモータ8の駆動を制御する制御部9と、回転検知センサ7及び制御部9に電力を供給するバッテリ10とが設けられている。
【0010】ギア4の回転軸は補助器具2と固定具1とを回転可能に接続し、ギア5及びギア6の回転軸は固定具1に取り付けられている。ギア4とギア5とはチェーン3を介して接続されている。回転検知センサ7は回転を検知すると、この回転数に対応した信号を制御部9に出力する。
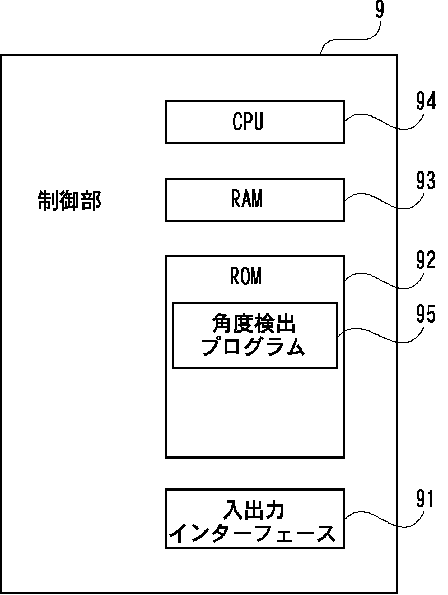
【0011】図2は制御部9の構成を示す図である。制御部9は、信号の入出力を行うための入出力インターフェース91と、制御プログラムを格納するROM92と、制御プログラムを実行するためのワークエリアであるRAM93と、RAM93、ROM92及び入出力インターフェース91を制御するCPU94とを備えている。ROM92には、回転検知センサ7から出力されたギア6の回転数に対応する信号に基づいて使用者の胴体に対する大腿部の前後方向の角度を検出する角度検出プログラム95が記憶されている。
【0012】CPU94は、回転検知センサ7から出力されたギア6の回転数に対応する信号が入出力インターフェース91に入力されると、角度検出プログラム95を実行し、使用者の胴体に対する大腿部の前後方向の角度を検出する。そして、この検出された角度に基づいてモータ8を駆動するか否かを判断し、この判断結果に応じた信号を入出力インターフェース91を介してモータ8に出力する。モータ8はCPU94から入力された信号により駆動する。
【0013】CPU94は、モータ8に所定の定電流を流すように制御する定電流駆動制御、モータ8に所定の定電圧を供給するように制御する定電圧駆動制御、及びモータ8に所定のパルス幅のパルスを周期的に供給するPWM(パルス幅変調)駆動制御の3つの制御方法を有するが、本実施の形態ではPWM駆動制御を行う。尚、上記定電流駆動制御における定電流の所定の値、定電圧駆動制御における定電圧の所定の値、及びPWM駆動制御におけるパルス幅の所定の値はいずれも可変であるため、これらの所定の値を制御することで、CPU94はモータ8の駆動力を徐々に増加又は減少させることができる。
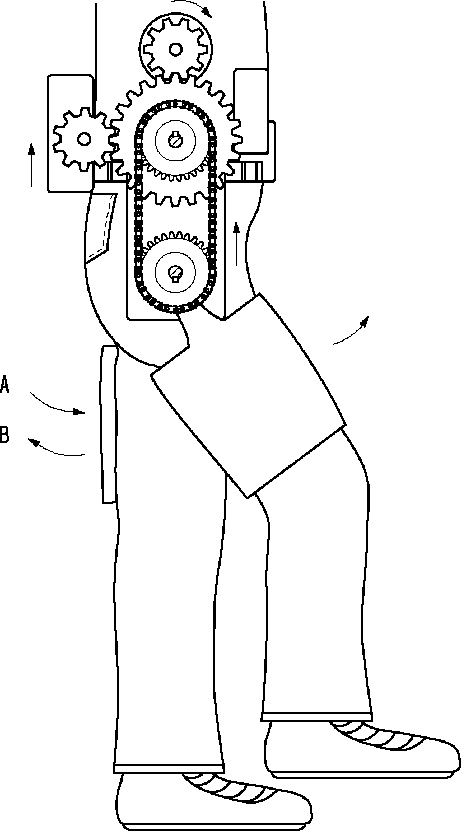
【0014】図3は、使用者が右足を踏み出したときの様子を示す図である。図3中のA方向は、使用者が足を踏み出したときの足の回転方向であり(反時計回り)、図3中のB方向は、使用者が足を引き戻したときの足の回転方向である(時計回り)。
【0015】以下(1)〜(16)で、使用者が停止状態から右足を踏み出したときの歩行補助装置100の作動状態を示す。
(1)使用者が右足を上げ始める。
(2)使用者の大腿部に取り付けられた補助器具2が回転する(A方向)。
(3)ギア4、チェーン3、ギア5及びギア6が回転する(A方向)。
(4)回転検知センサ7が回転(右足の上昇)を検知する。
(5)回転検知センサ7から回転数に対応した信号が制御部9に出力される。
(6)制御部9により予め設定された電力がモータ8に供給される。(尚、予め設定された電力は、使用者の力を超えず、使用者の力で容易にモータ8の回転を止められる大きさである。)
(7)モータ8が回転する(B方向)。
(8)ギア6、ギア5、チェーン3及びギア4が回転する(A方向)。
(9)右足の動きをA方向に補助する。
(10)使用者が右足の動きを止める。
(11)ギア6、ギア5、チェーン3及びギア4の回転が停止する。
(12)回転検知センサ7が回転の停止を検知する。
(13)回転検知センサ7から回転停止に対応した信号が制御部9に出力される。
(14)制御部9がモータ8の駆動を停止させる。
(15)右足の動きをA方向に補助しなくなる。
(16)右足が自重で下がる
左足を踏み出したときの歩行補助装置100の作動状態は上述の(1)〜(16)と同様であるので、その説明は省略する。
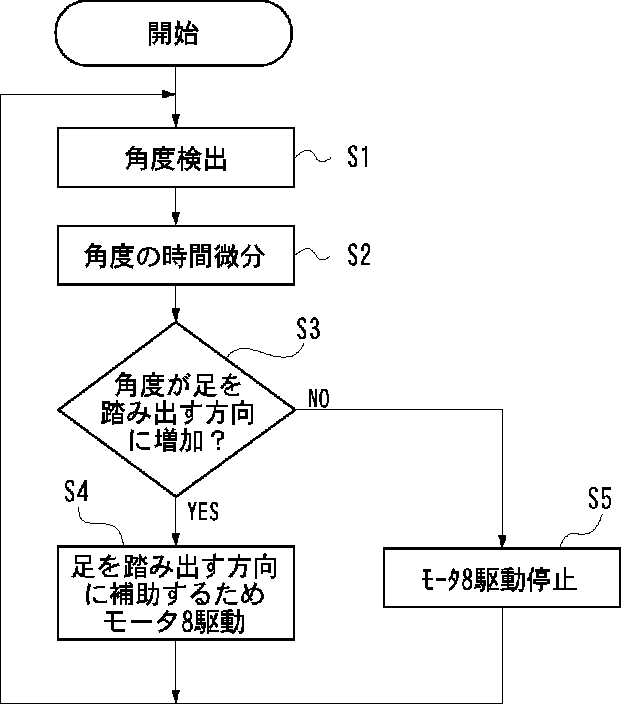
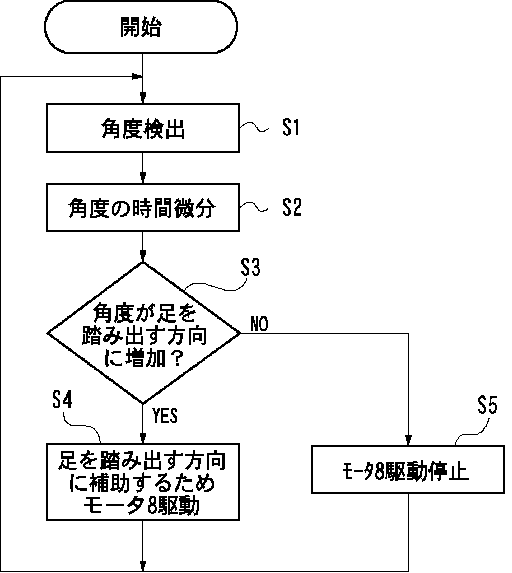
【0016】図4は、歩行補助装置100を作動させるためにCPU94で実行されるプログラムを示すフローチャートである。尚、このプログラムは左右の足の夫々について並列に実行される。また、このプログラムはCPU94にバッテリ10からの電力が供給されなくなるまで実行される。
【0017】まず、回転検知センサ7から出力されたギア6の回転数に対応する信号が入出力インターフェース91に入力されると、角度検出プログラム95を実行し、使用者の胴体に対する大腿部の前後方向の角度を検出する(ステップS1)。
【0018】次に、ステップS1で検出された角度を時間微分し(ステップS2)、この微分値からステップS1で検出された角度が足を前方に踏み出す方向に増加しているか否かを判別し(ステップS3)、該角度が足を前方に踏み出す方向に増加している場合には、該角度が増加している足の歩行補助を行うためにモータ8に所定のパルス幅のパルスを周期的に供給する(ステップS4)、一方、該角度が足を前方に踏み出す方向に増加していない場合には、モータ8にパルスを供給することを停止し、モータ8の駆動を停止させる(ステップS5)。この後、ステップS1に戻る。
【0019】尚、モータ8による足を補助する力は、歩行時に本来使用者が持っている足を前方に踏み出す力よりも小さくなるように制御され、例えば、膝の位置で5kgfを超えないようにモータ8の駆動力が制御される。
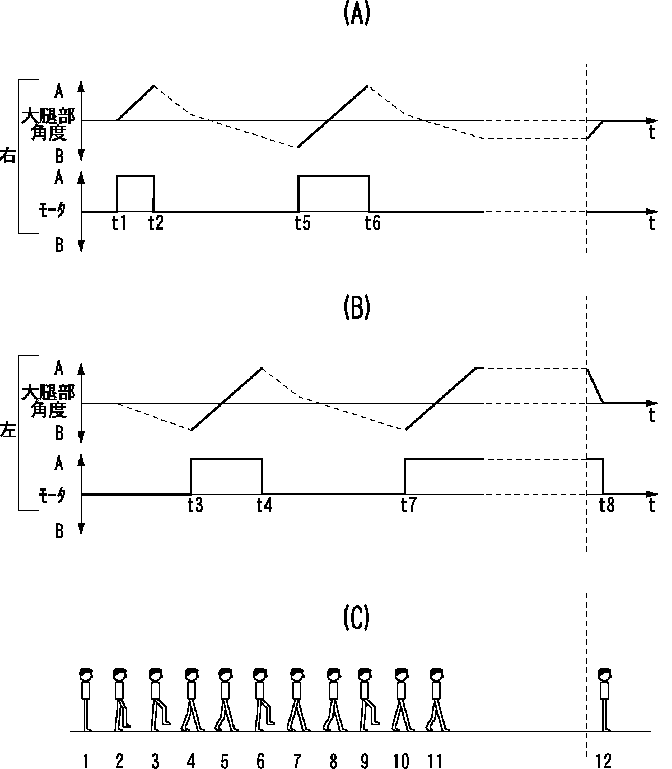
【0020】図5は上記図4のプログラムが実行されているときの使用者の胴体に対する大腿部角度とモータ8の作動状態との関係を示す図である。図5(A)は使用者の胴体に対する右足の大腿部角度とモータ8の作動状態との関係を示す図であり、図5(B)は使用者の胴体に対する左足の大腿部角度とモータ8の作動状態との関係を示す図である。図中の時刻t1,t3,t5,t7の時に、モータ8に所定のパルス幅のパルスを周期的に供給する(図4のステップS4)ことを開始し、時刻t2,t4,t6,t8の時に、モータ8にパルスを供給することを停止する(図4のステップS5)。
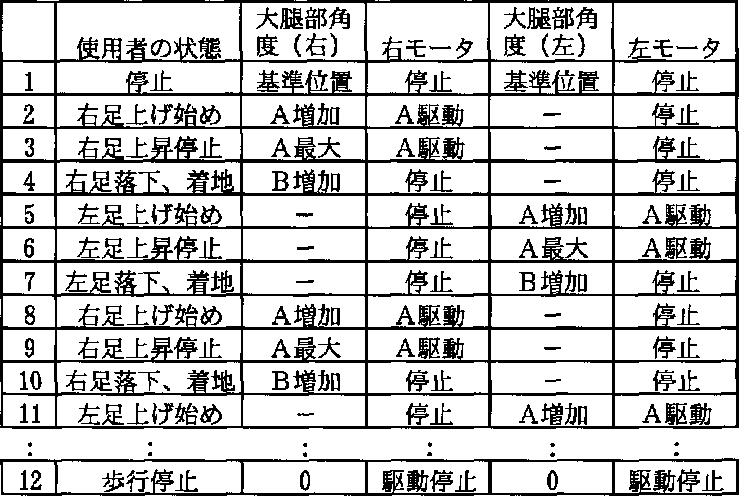
【0021】図5(C)は使用者が歩行している状態を示す図である。尚、図5(C)の1〜12の番号は、下の表1の左欄1〜12の番号に対応している。
【0022】下の表1中の大腿部角度の欄で「A増加」はA方向(使用者が足を踏み出したときの足の回転方向)に増加を示し、「B増加」はB方向(使用者が足を引き戻したときの足の回転方向)に増加を示し、「A最大」はA方向の最大角を示す。また、表1中の右モータ及び左モータの欄で「A駆動」はモータ8をA方向に駆動させることを示す。
【0023】
【表1】
【0024】上述したように、本実施の形態によれば、使用者の胴体に対する大腿部の前後方向の角度を検出し、この検出された角度を時間微分し、この微分値から前記検出された角度が足を前方に踏み出す方向に増加しているか否かを判別し、該角度が足を前方に踏み出す方向に増加している場合には、該角度が増加している足の歩行補助を行うためにモータ8に所定のパルス幅のパルスを周期的に供給するので、手軽に日常の歩行動作の補助をすることができる。
【0025】(第2の実施の形態)本発明の第2の実施の形態に係る歩行補助装置の構成は、前記第1の実施の形態に係る歩行補助装置100の構成と同様であるため、その説明は省略する。本実施の形態に係る歩行補助装置は、足を踏み出すときの補助機能に加えて足を引き戻すときの補助機能を備えている点で歩行補助装置100と異なる。これにより、階段を上る場合に、体を持ち上げるため上段に足を伸ばす動作や、椅子に座った状態から立ち上がるときに両足を伸ばす動作を補助することができる。
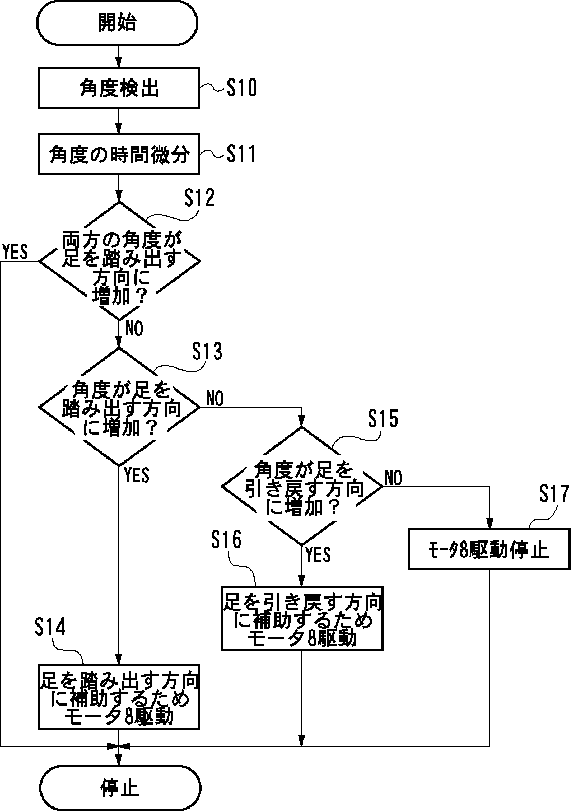
【0026】図6は、CPU94で実行されるプログラムを示すフローチャートである。尚、このプログラムは左右の足の夫々について並列に実行される。
【0027】まず、図4のステップS1、ステップS2と同様に、使用者の胴体に対する大腿部の前後方向の角度を検出し(ステップS10)、該検出された角度を時間微分する(ステップS11)。
【0028】次に、この微分値からステップS10で検出された角度が両足を前方に踏み出す方向に増加しているか否かを判別し(ステップS12)、該角度が両足を前方に踏み出す方向に増加している場合には、モータ8が駆動されることなく、本プログラムを終了する。このようにしたのは、使用者が椅子に座る場合に、椅子に座りやすくすることを想定したためである。
【0029】ステップS12で、該角度が両足を前方に踏み出す方向に増加していない場合には、ステップS13に進む。ステップS13、ステップS14は、上述した図4のステップS3、ステップS4と同様であるので、その説明は省略する。
【0030】ステップS14で、モータ8に所定のパルス幅のパルスを周期的に供給した後、本プログラムを終了する。
【0031】次いで、ステップS13で、検出された角度が足を前方に踏み出す方向に増加していない場合には、ステップS11の微分値からステップS10で検出された角度が足を後方に引き戻す方向に増加しているか否かを判別し(ステップS15)、該角度が足を後方に引き戻す方向に増加している場合には、該角度が増加している足の補助を行うためにモータ8に所定のパルス幅のパルスを周期的に供給し(ステップS16)、本プログラムを終了する一方、該角度が足を後方に引き戻す方向に増加していない場合には、モータ8にパルスを供給することを停止し、モータ8の駆動を停止させ(ステップS17)、本プログラムを終了する。
【0032】尚、モータ8による足を補助する力は、本来使用者が持っている足を前方に踏み出す力及び足を後方に引き戻す力よりも小さくなるように制御され、例えば、足を前方に踏み出す力の補助の場合、膝の位置で5kgfを超えないようにモータ8の駆動力が制御される。
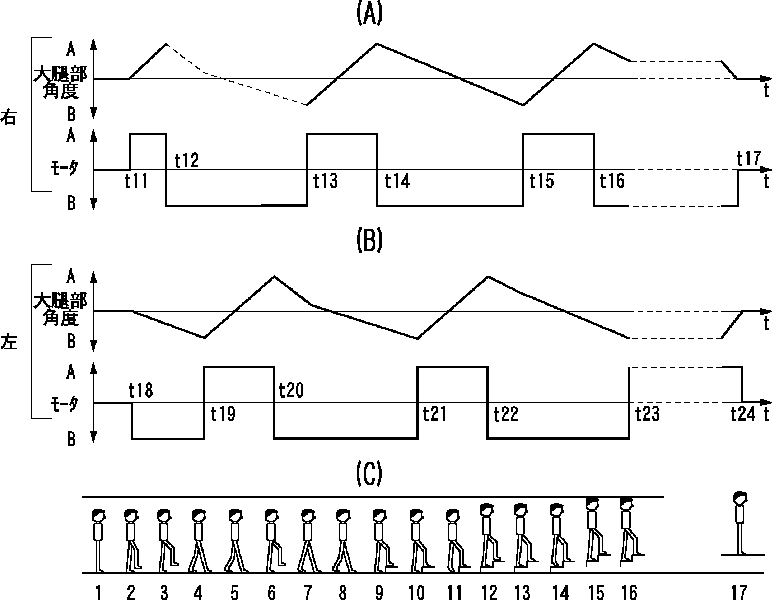
【0033】図7は上記図6のプログラムが実行されているときの使用者の胴体に対する大腿部角度とモータ8の作動状態との関係を示す図である。図7(A)は使用者の胴体に対する右足の大腿部角度とモータ8の作動状態との関係を示す図であり、図7(B)は使用者の胴体に対する左足の大腿部角度とモータ8の作動状態との関係を示す図である。
【0034】図中の時刻t11,t13,t15,t19,t21,t23の時には、図6のステップS14で説明したようにモータ8に所定のパルス幅のパルスを周期的に供給することを開始し、時刻t12,t14,t16,t18,t20,t22の時には、図6のステップS16で説明したようにモータ8に所定のパルス幅のパルスを周期的に供給することを開始し、時刻t17,t24の時には、図6のステップS17で説明したようにモータ8にパルスを供給することを停止する。
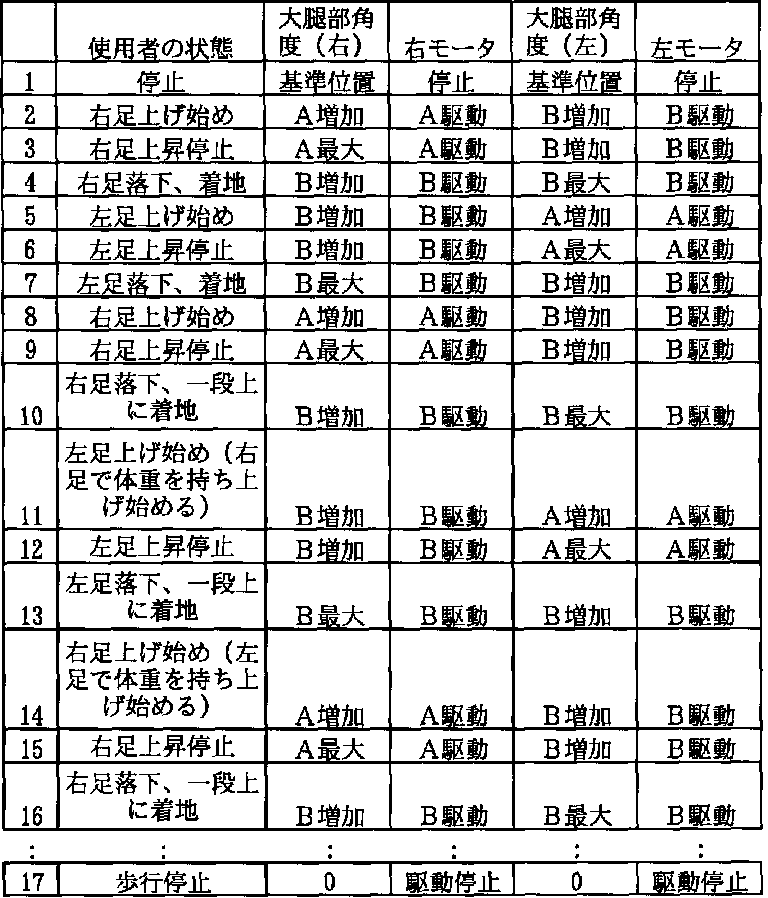
【0035】図7(C)は使用者が歩行している状態を示す図である。尚、図7(C)の1〜17の番号は、下の表2の左欄1〜17の番号に対応している。
【0036】下の表2中の大腿部角度の欄で「A増加」はA方向(使用者が足を踏み出したときの足の回転方向)に増加を示し、「B増加」はB方向(使用者が足を引き戻したときの足の回転方向)に増加を示し、「A最大」はA方向の最大角を示し、「B最大」はB方向の最大角を示す。また、表2中の右モータ及び左モータの欄で「A駆動」はモータ8をA方向に駆動させることを示し、「B駆動」はモータ8をB方向に駆動させることを示す。
【0037】
【表2】
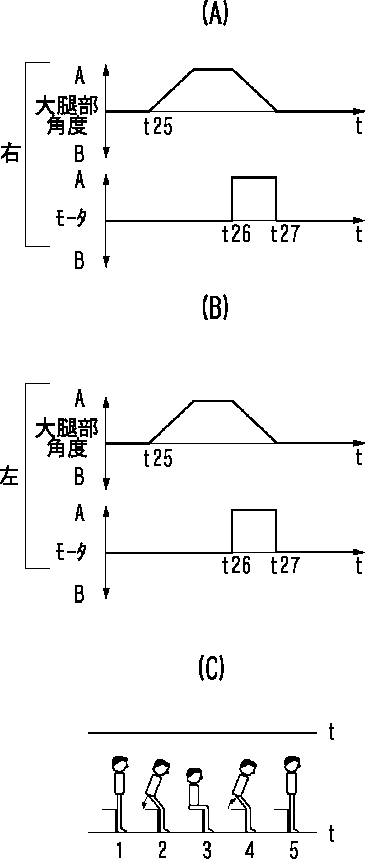
【0038】図8は上記図6のプログラムが実行されているときの使用者の胴体に対する大腿部角度とモータ8の作動状態との関係を示す図である。図8(A)は使用者の胴体に対する右足の大腿部角度とモータ8の作動状態との関係を示す図であり、図8(B)は使用者の胴体に対する左足の大腿部角度とモータ8の作動状態との関係を示す図である。
【0039】図中の時刻t25の時には、使用者の胴体に対する大腿部の前後方向の角度が両足を前方に踏み出す方向に増加しているので、モータ8による補助を行わず、椅子に座りやすくなっている(図6のステップS12でYES)。時刻t26の時には、モータ8に所定のパルス幅のパルスを周期的に供給することを開始し(図6のステップS14)、時刻t27の時には、モータ8にパルスを供給することを停止する(図6のステップS17)。
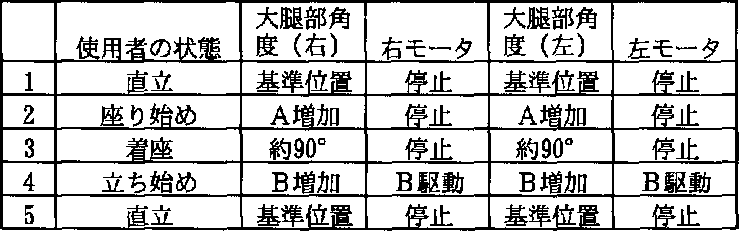
【0040】図8(C)は使用者が着席する状態及び起立する状態を示す図である。尚、図8(C)の1〜5の番号は、下の表3の左欄1〜5の番号に対応している。
【0041】下の表3中の大腿部角度の欄で「A増加」はA方向(使用者が足を踏み出したときの足の回転方向)に増加を示し、「B増加」はB方向(使用者が足を引き戻したときの足の回転方向)に増加を示す。また、表3中の右モータ及び左モータの欄で「B駆動」はモータ8をB方向に駆動させることを示す。
【0042】
【表3】
【0043】上述したように、本実施の形態によれば、使用者の胴体に対する両大腿部の前後方向の角度を検出し、この検出された角度を時間微分し、この微分値から前記検出された角度が、両足を前方に踏み出す方向には増加していないが、片足を前方に踏み出す方向又は片足を後方に引き戻す方向に増加している場合には、該角度が増加している足の歩行補助を行うためにモータ8に所定のパルス幅のパルスを周期的に供給するので、手軽に日常の歩行動作及び足を伸ばす動作等の補助をすることができる。
【0044】また、使用者の胴体に対する両大腿部の前後方向の角度が両足を前方に踏み出す方向に増加しているには、モータ8による補助を行わず、本プログラムを終了するので、例えば、使用者が椅子に座る場合には、椅子に座りやすくすることができる。
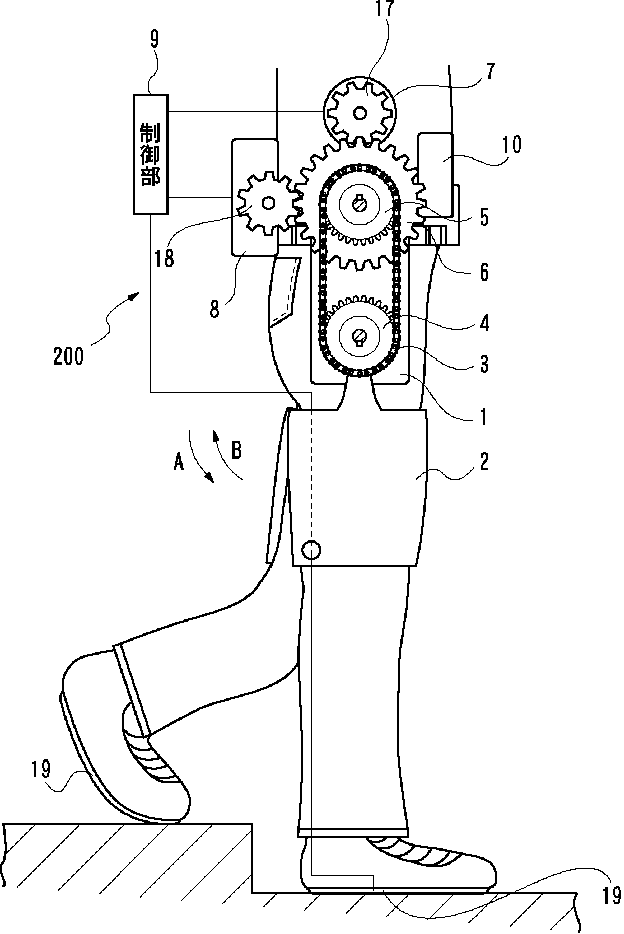
【0045】(第3の実施の形態)図9は本発明の第3の実施の形態に係る歩行補助装置200の構成を示す図である。
【0046】この歩行補助装置200は、足裏に加わる圧力を検出するための感圧センサ19を備えている点のみ歩行補助装置100と異なり、その他の構成は同様であるので、その説明は省略する。
【0047】感圧センサ19は、制御部9に接続されており、足裏に加わる圧力を感知すると、この圧力に対応した信号を制御部9に出力する。
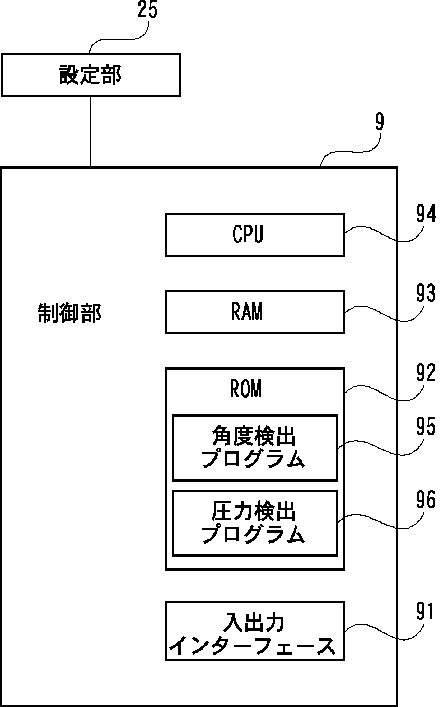
【0048】図10は、制御部9の構成を示す図である。本実施の形態の制御部9は、上述した図2の制御部9と比べ、ROM92が感圧センサ19から出力された信号に基づいて足裏に加わる圧力を検出する圧力検出プログラム96を備えている点と、補助を行う条件となるパラメータの設定を使用者により自由に行うことができる設定部25が接続されている点とが異なり、その他の構成は同様であるので、その説明は省略する。
【0049】CPU94は、回転検知センサ7から出力されたギア6の回転数に対応する信号及び感圧センサ19から出力された信号が入出力インターフェース91に入力されると、角度検出プログラム95及び圧力検出プログラム96を実行し、使用者の胴体に対する大腿部の前後方向の角度及び足裏に加わる圧力を検出する。そして、この検出された角度及び圧力に基づいてモータ8を駆動するか否かを判断し、この判断結果に応じた信号を入出力インターフェース91を介してモータ8に出力する。モータ8はCPU94から入力された信号により駆動する。
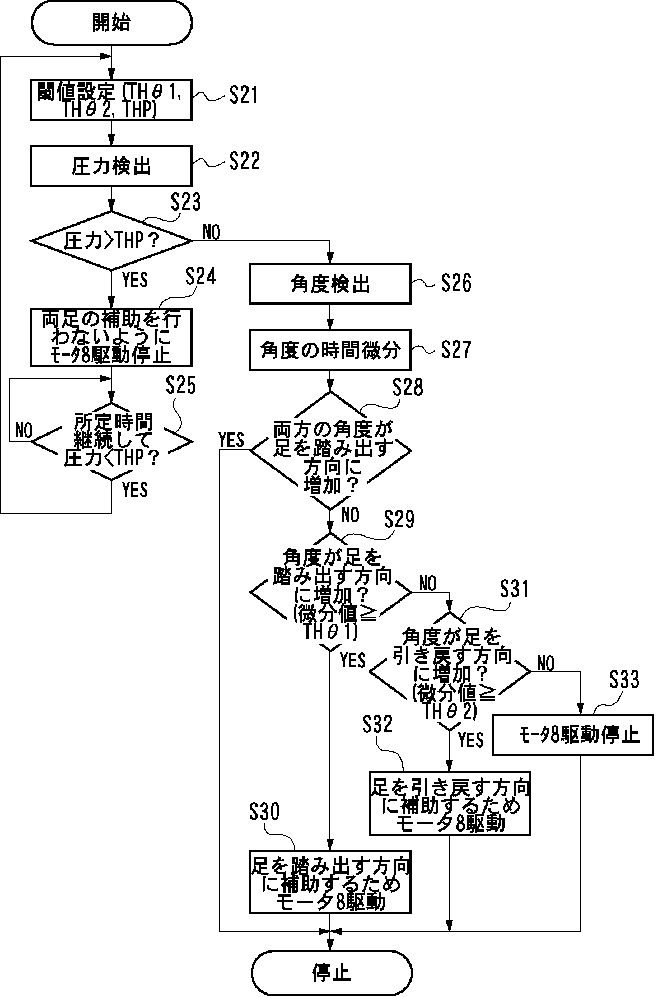
【0050】図11は、CPU94で実行されるプログラムを示すフローチャートである。尚、このプログラムは左右の足の夫々について並列に実行される。
【0051】まず、後述する単位時間あたりの角度の閾値THθ1、閾値THθ2及び圧力の閾値THPを設定部25からの信号により設定し(ステップS21)、感圧センサ19から出力された信号が入出力インターフェース91に入力されると、圧力検出プログラム96を実行し、左右の足裏に加わる圧力を検出する(ステップS22)。そして、どちらか一方の足裏に加わる圧力が閾値THPより大きいか否かを判別し(ステップS23)、どちらか一方の足裏に加わる圧力が閾値THPより大きいときには、階段を下りていると判断し、両足とも補助を行わないようにモータ8にパルスを供給することを停止し、モータ8の駆動を停止させる(ステップS24)。
【0052】その後、所定時間継続して両足の足裏の圧力が閾値THPより小さいか否かを判別し(ステップS25)、所定期間内にどちらか一方の足裏に加わる圧力が閾値THP以上の場合には、所定期間継続して両足の足裏の圧力が閾値THPより小さくなるまで待ってからステップS21に戻る。
【0053】上記ステップS23で、どちらか一方の足裏に加わる圧力が閾値THP以下の場合には、ステップS26に進む。ステップS26〜ステップS33は上述した図6のステップS10〜ステップS17とほぼ同様であるため、異なる点のみ説明する。
【0054】ステップS27の微分値が上記閾値THθ1以上であるか、即ち、ステップS26で検出される角度が足を前方に踏み出す方向に増加しているか否かを判別し(ステップS29)、該角度が足を前方に踏み出す方向に増加している場合には、ステップS30に進む。一方、該角度が足を前方に踏み出す方向に増加していない場合には、ステップS27の微分値が上記閾値THθ2以上であるか、即ち、ステップS26で検出される角度が足を後方に引き戻す方向に増加しているか否かを判別し(ステップS31)、該角度が足を後方に引き戻す方向に増加している場合には、ステップS32に進む一方、該角度が足を後方に引き戻す方向に増加していない場合には、ステップS33に進む。
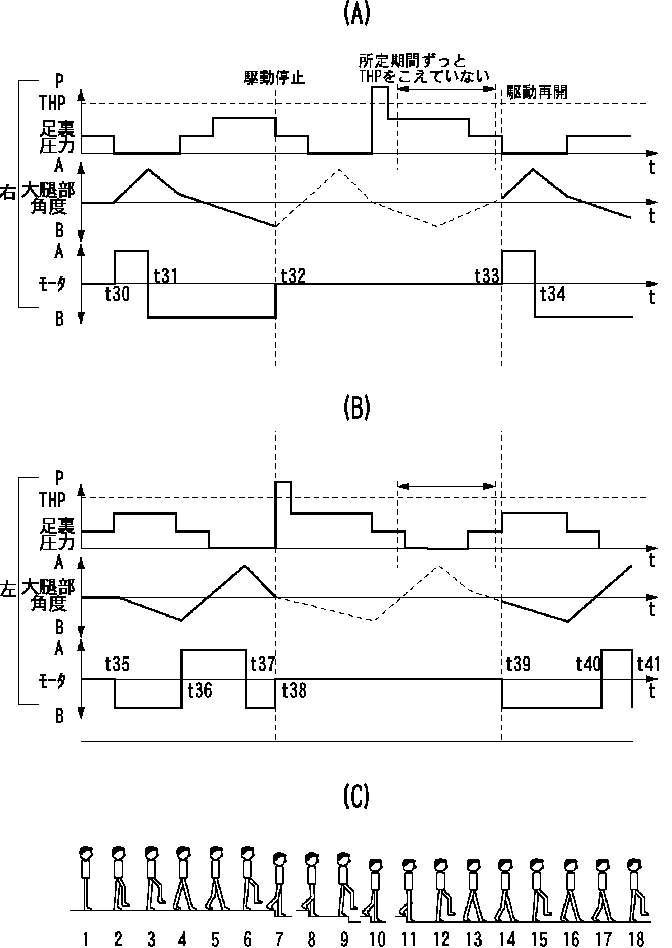
【0055】図12は上記図11のプログラムが実行されているときの使用者の足裏に加わる圧力と、使用者の胴体に対する大腿部角度と、モータ8の作動状態との関係を示す図である。図12(A)は使用者の右足の足裏に加わる圧力と、使用者の胴体に対する右足の大腿部角度と、モータ8の作動状態との関係を示す図であり、図12(B)は使用者の左足の足裏に加わる圧力と、使用者の胴体に対する左足の大腿部角度と、モータ8の作動状態との関係を示す図である。
【0056】図中の時刻t30,t33,t36,t40の時には、図11のステップS30で説明したようにモータ8に所定のパルス幅のパルスを周期的に供給することを開始し、時刻t31,t34,t35,t37,t39,t41の時には、図11のステップS32で説明したようにモータ8に所定のパルス幅のパルスを周期的に供給することを開始する。時刻t32,t38の時には、図11のステップS24で説明したようにモータ8にパルスを供給することを停止する。
【0057】図12(C)は使用者が歩行している状態を示す図である。尚、図12(C)の1〜18の番号は、下の表4の左欄1〜18の番号に対応している。
【0058】下の表4中の大腿部角度の欄で「A増加」はA方向(使用者が足を踏み出したときの足の回転方向)に増加を示し、「B増加」はB方向(使用者が足を引き戻したときの足の回転方向)に増加を示し、「A最大」はA方向の最大角を示し、「B最大」はB方向の最大角を示す。また、表4中の右モータ及び左モータの欄で「A駆動」はモータ8をA方向に駆動させることを示し、「B駆動」はモータ8をB方向に駆動させることを示す。さらに、表4中の右足裏圧力及び左足裏圧力の欄で「P」は使用者が両足で直立しているときの足裏の圧力を示し、「2P」は片足に全体重がかかっているときの足裏の圧力を示し、「THP」は設定部25で使用者が設定する足裏の圧力の閾値を示す。
【0059】
【表4】
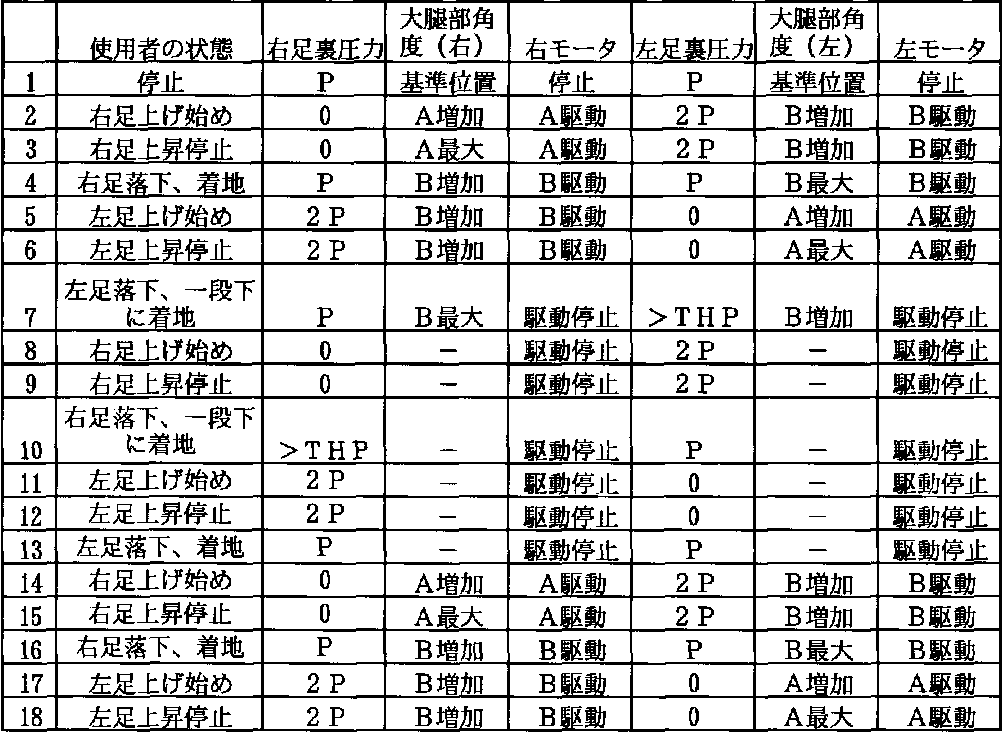
【0060】上述したように、本実施の形態によれば、歩行補助装置200は、両足の足裏に感圧センサ19を取り付け、階段を下りるときに補助を働かせないようにする機能と、補助を働かせるための単位時間あたりの角度(閾値THθ1、閾値THθ2)を設定する機能とを備えたので、階段を下りやすくすると共に使用者が歩行補助装置200の装着感を自由に設定することができる。
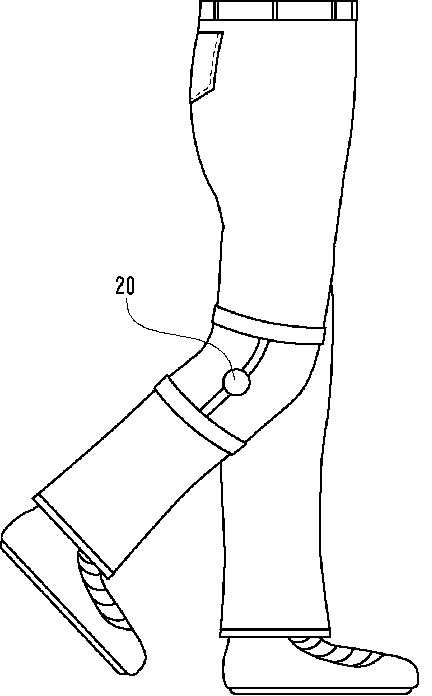
【0061】第1〜第3の実施の形態では、使用者の胴体に対する大腿部角度により歩行状態を判断したが、足の筋肉の収縮や神経からのセンシング等を利用して歩行状態を判断してもよい。また、図13に示すように膝の角度を検知して歩行状態を判断してもよい。
【0062】図13に示すように、人は歩行しているときに、踏み出そうとする足の膝(図13では右足の膝)を曲げて、もう一方の足(図13では左足)は軸足として膝を曲げない。この膝の曲がった角度を図13に示すような角度センサ20で検知し、この角度センサ20で検知された角度に対応する信号を制御部9に出力し、第1〜第3の実施の形態で説明したモータ8の駆動の制御を行っても、本発明と同様の効果を奏する。
【0063】また、第1〜第3の実施の形態では、補助のための動力としてモータ8を使用したが、弾性体(バネ、ゴム)、原動機、エアシリンダ、及び膝の動きに合わせて動きを補助するもの等であってもよく、こららのものを適宜組み合わせてより繊細な補助を行えるようにしてもよい。
【0064】
【発明の効果】以上詳細に説明したように、請求項1の歩行補助装置によれば、検出手段により両足の動きが検出されたときに、両足の動きを補助するため動力手段の動力が制御されるので、手軽に日常の歩行動作の補助をすることができる。
【図面の簡単な説明】
【図1】本発明の第1の実施の形態に係る歩行補助装置100の構成を示す図である。
【図2】図1の制御部9の構成を示す図である。
【図3】使用者が右足を踏み出したときの様子を示す図である。
【図4】図1の歩行補助装置100を作動させるために図2のCPU94で実行されるプログラムを示すフローチャートである。
【図5】図4のプログラムが実行されているときの使用者の胴体に対する大腿部角度とモータ8の作動状態との関係を示す図である。
【図6】図2のCPU94で実行されるプログラムを示すフローチャートである。
【図7】図6のプログラムが実行されているときの使用者の胴体に対する大腿部角度とモータ8の作動状態との関係を示す図である。
【図8】図6のプログラムが実行されているときの使用者の胴体に対する大腿部角度とモータ8の作動状態との関係を示す図である。
【図9】本発明の第3の実施の形態に係る歩行補助装置200の構成を示す図である。
【図10】図9の制御部9の構成を示す図である。
【図11】図10のCPU94で実行されるプログラムを示すフローチャートである。
【図12】図11のプログラムが実行されているときの使用者の足裏に加わる圧力と、使用者の胴体に対する大腿部角度と、モータ8の作動状態との関係を示す図である。
【図13】膝の角度を検知する角度センサ20の構成を示す図である。
【符号の説明】
1 固定具
2 補助器具
3 チェーン
4,5,6,17,18 ギア
7 回転検知センサ(検出手段)
8 モータ(動力手段)
9 制御部(検出手段、制御手段)
10 バッテリ
100,200 歩行補助装置
【図1】
【図2】
【図8】
【図3】
【図4】
【図5】
【図6】
【図7】
【図9】
【図10】
【図12】
【図11】
【図13】

{kind=link}